



Septentrio产品伽利略卫星导航系统之现况更新
Septentrio伽利略卫星导航系统之现况更新
原创:李亚东,转自:septentrio中国公众号


自2011年首颗试验卫星开始,先后10次火箭发射将26颗卫星送入太空。E14,E18 两颗卫星由于火箭发射失误未进入正常轨道,后经过一系列变轨后播发GPS L5信号做在轨试验。E20,E22两颗卫星先后因在轨电源故障和原子钟故障关闭。所以到目前为止伽利略系统共有在轨可用卫星22颗。据报道,ESA计划在2020年12月使用俄罗斯联盟号运载火箭Fregat-MT发射2颗Galileo卫星完成组网。


E5信号中心频率为1191.795 MHz,由E5a、E5b两组独立的信号组成。其中E5a中心频率为1176.45 MHz,比E5载波频率低15.345 MHz。E5b中心频率为1207.14 MHz,比E5载波频率高15.345 MHz。E5a和E5b即可以当作E5频段内两个不同载波频率的独立信号跟踪处理,又可以合成一个宽带信号来处理。E5使用AltBOC调制,带宽为51.15 MHz,具有更好的多径抑制效果和Gabor带宽。
E6信号中心频点为1278.75 MHz,包括E6-A、E6-B和E6-C三个信号分量。与E1频点类似, E6-A分量是Galileo 系统公共特许服务(PRS)。E6-B和E6-C分别是Galileo 商业服务(CS)的数据分量和导频分量。
各信号对应的载波频率和参考带宽如下:

详细内容请参Galileo公开服务空间接口控制文件
我们总结下来:Galileo系统由24颗工作卫星、6颗备份卫星组成。目前在网运行22颗。还差2颗完成工作卫星组网,计划今年12月补齐。
问题来了,Galileo系统组网大体都完成了,可以正常工作吗?性能如何呢?iGMAS专家说:“一般来说专业机构评估某个系统可用性会评估URE、空间信号可用性、空间信号连续性、广播电离层精度、定位精度、定位可用性、PDOP可用性等。” 当然这也需要更多的参考接收机以及更长的观测时间。关于几大系统的星座状况可以访问iGMAS官网http://www.igmas.org/ 。而对于终端用户而言难以将这些参数与自己应用相对应,终端用户更关心不同工作模式下的定位精度和定位可用性。下面就和大家分享一下Galileo系统在国内的性能测试情况。

其他测试设备,DUTs天线使用中海达全系统全频点天线AT-35101,在此也特别感谢中海达的天线赞助。参考站使用Septentrio参考站接收机PolaRx5e,参考站天线选用Septentrio PolaNt-x MF。
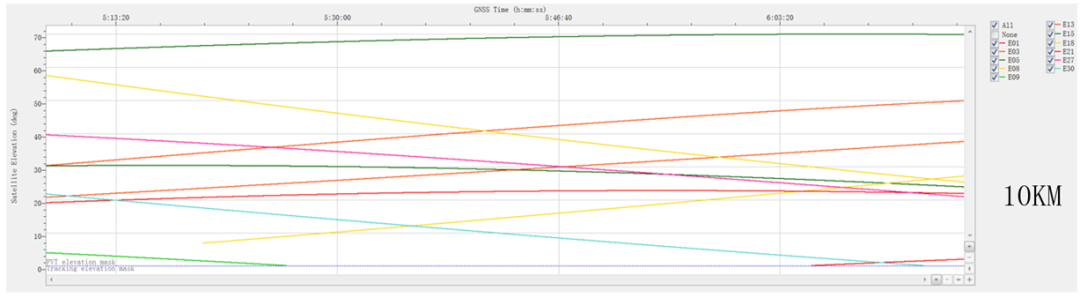
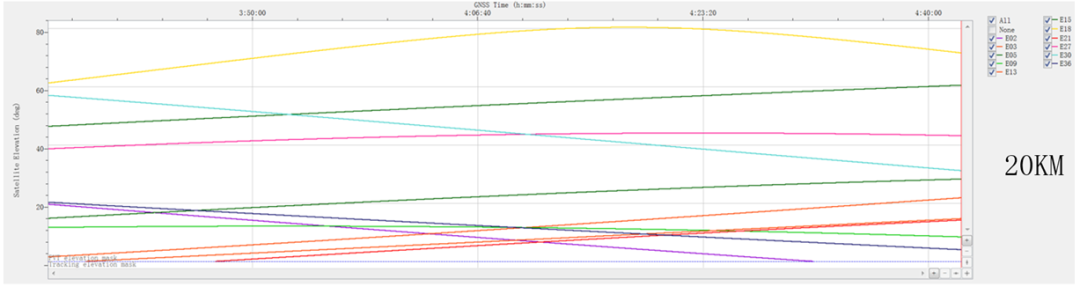
2. 10km,20km,30km的静态实时RTK测试,Galileo Only RTK VS. GPS Only RTK。
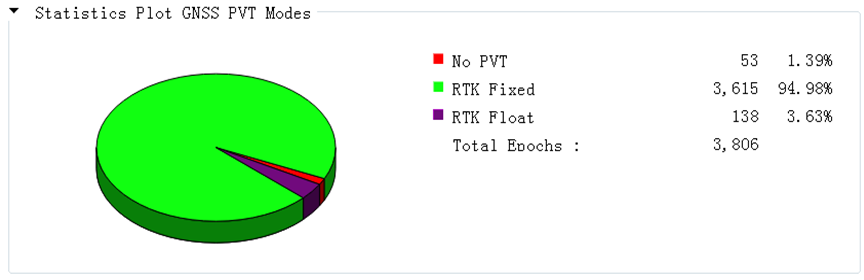
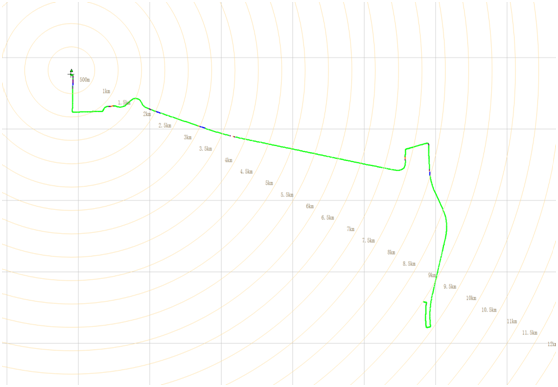
3.实时RTK动态跑车性能,Galileo Only RTK VS. GPS Only RTK。
首先用数据质量分析工具Anubis和BKG对GPS系统和Galileo系统进行简单质量分析:

通过上图系统可用频段可以直观看到GPS系统60%的卫星是双频,40%的卫星是三频。Galileo系统全部卫星都是四频。

载噪比方面,L1/E1频点GPS和Galileo比较接近,L2/E5b频点伽利略更好一点。因为不是所有的GPS卫星都支持L2C,而L2P(Y)的载噪比要低一些,尤其是低仰角部分更为明显。


通过Anubis软件计算的单点定位性能和多路径可看出Galileo系统性能比GPS好,这得益于其高性能的星载原子钟。
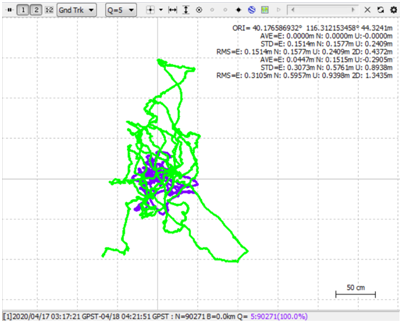 上图中绿色轨迹为GPS SPP,紫色为Galileo SPP,明显的看出Galileo的单点精度好于GPS。由于知道楼顶天线位置,所以可以计算水平、高程和三维的瞬态误差,测试用同时使用了四系统的单点结果作为参考,详情如下:
上图中绿色轨迹为GPS SPP,紫色为Galileo SPP,明显的看出Galileo的单点精度好于GPS。由于知道楼顶天线位置,所以可以计算水平、高程和三维的瞬态误差,测试用同时使用了四系统的单点结果作为参考,详情如下: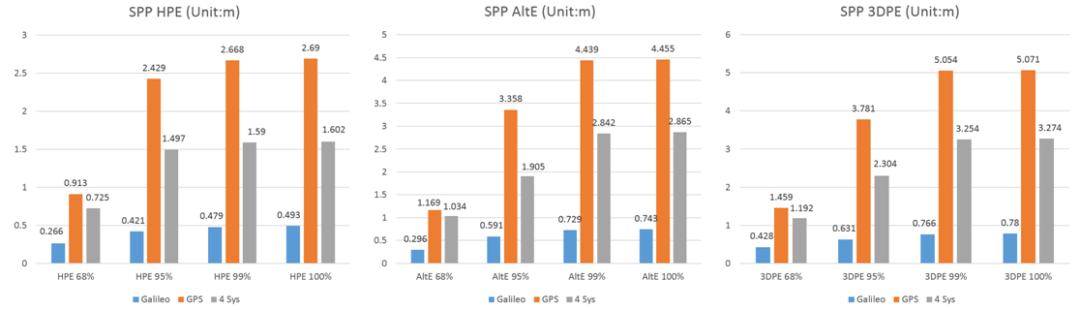
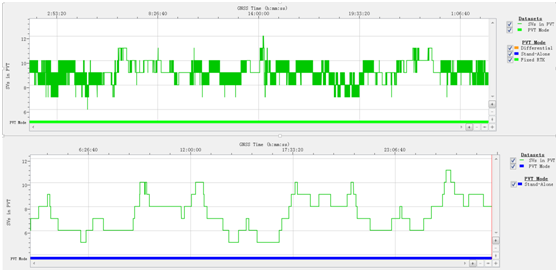
5°仰角以上可用卫星数来看, GPS卫星数24小时均值9.73颗,Galileo为7.33颗。而从中国区域可见的最小卫星数来看,GPS最少7颗可用,并且90%时间有8颗以上大于5°仰角的卫星。反观Galileo系统最少5颗可用,有40%左右的时间仅有5、6颗大于5°仰角的卫星。所以从系统可用性的角度,GPS更好。当然,如前文所述,客户通常会选用多系统同时接收、混合定位,这也不会是很大问题。
测试是个苦差事,为了选择开阔天空GNSS测试工程师通常都工作在荒郊野岭(Feng Jing You Mei)的地方。有图有真相。


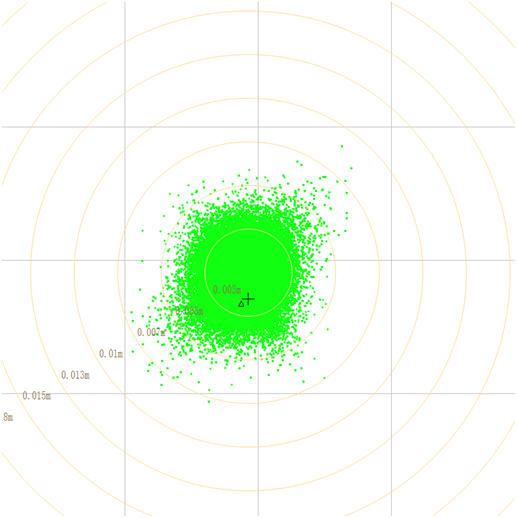
我做了很多的数据分析表格,但因篇幅有限,直接上定位结果和内符合、外符合精度分析结果:
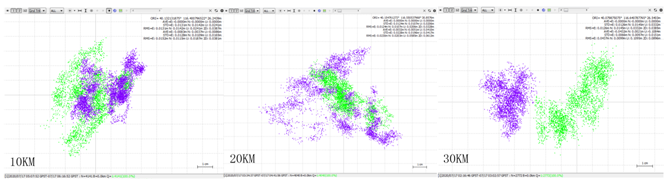
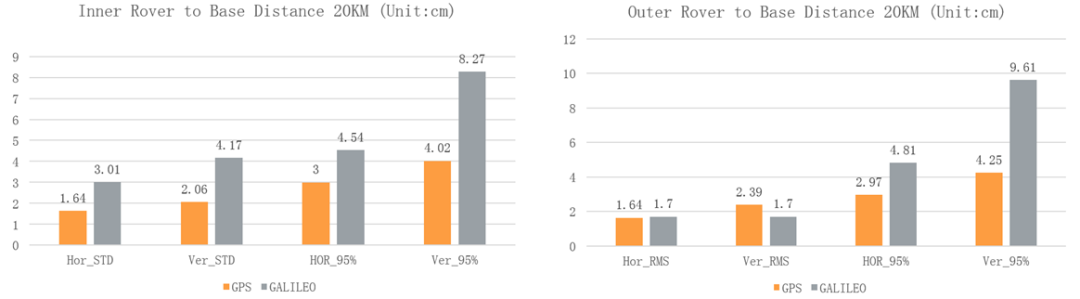
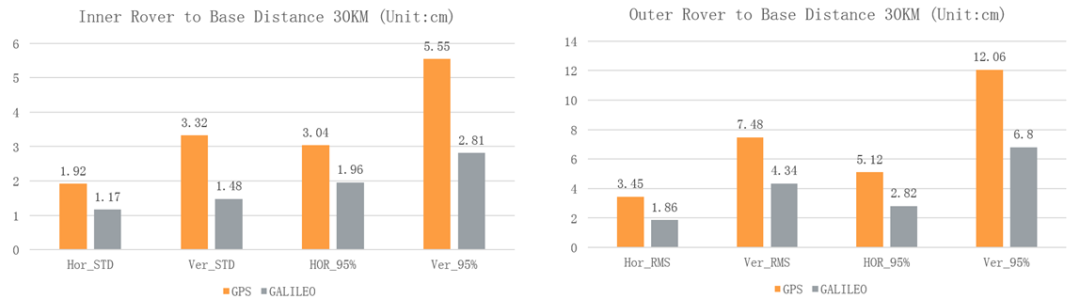
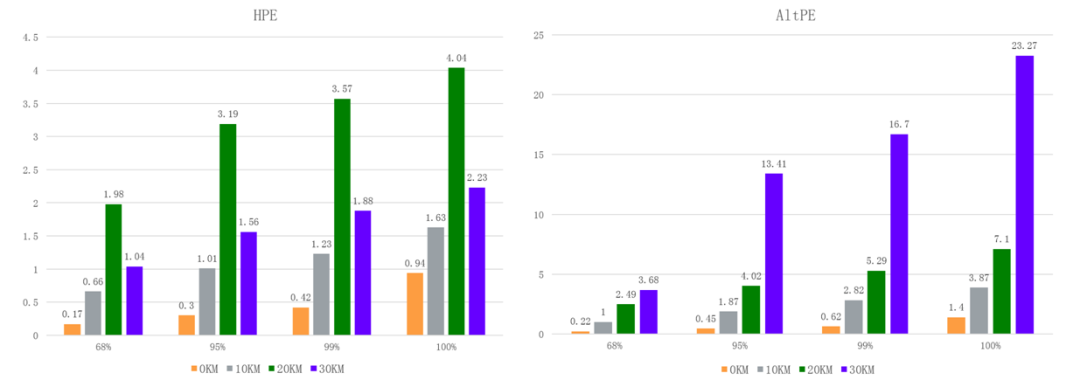
通过上述分析结果可以看出GPS和Galileo单系统RTK基本上可以满足水平精度1cm+1ppm高程精度1.5cm+1ppm的业界通用标称。10KM和30KM情况下,Galileo RTK Only精度略好于GPS RTK Only。20KM情况下,Galileo性能比GPS差。单分析Galileo系统瞬态精度,高程误差相对正常,随着Base和Rover距离变大而相应变化,但水平位置误差比30KM还差。如下图所示:
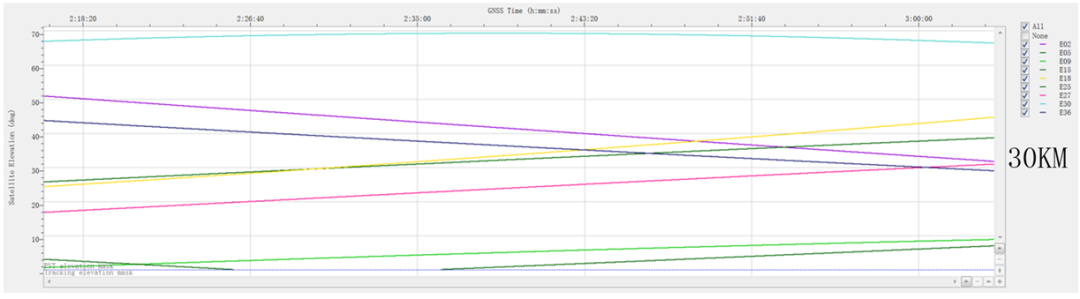
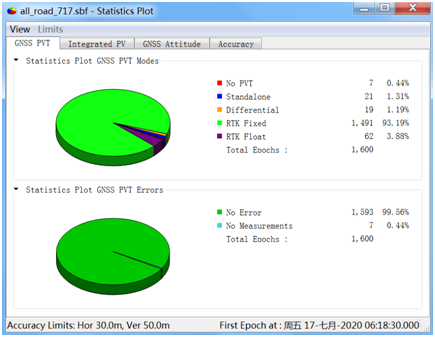
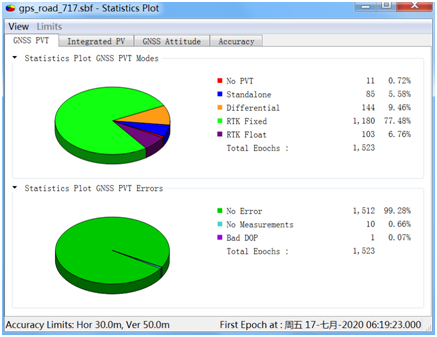
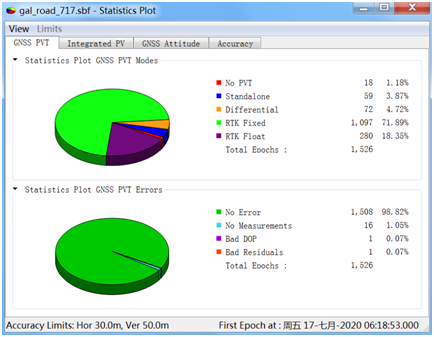
为了确认此问题,第二天在同样的时间点又做了一次测试,现象基本一致。期初我怀疑可能是20KM测试时段卫星数比较少或者DOP值差造成的。以此假设做了如下分析:

结论:
通过上述简单实验结果,相信大家会对Galileo系统有了新的认识。我本人认为Galileo系统目前基本可用,并且精度较好。虽然Galileo系统可用性暂时还不如GPS系统,但就GNSS行业发展到现在,多系统、多频点解决方案的普及的当下, Galileo系统应该被更多的支持和使用。原因有三:第一,针对目前对可靠性和精度要求高的双频RTK或者三频RTK来说,E5b及E5a的加入会增加更多的卫星。这对于那些因使用没有播发RTCM 1230消息的商用网络RTK服务而放弃GLONASS系统的接收机来说更为重要。第二,针对L1+L5的双频应用来说,因为GPS系统仅有一小部分卫星播发L5信号,所以BeiDou和Galileo系统是绝对的主力系统。而在B2a的RTCM协议正式发布前,此类应用目前还主要依靠Galileo系统。第三,因为E5a信号播发星历数据加上较高的码速率对多径的抑制作用,使得如穿戴式等对功耗极其敏感的应用可以完全放弃L1频点而使用单L5接收机,对于这样的设计来说Galileo系统是当仁不让的主系统,其代替了传统L1频点接收机GPS为主系统的地位。终上,让我们期待Galileo早日组网成功,携手BeiDou、GPS、GLONASS为我们的生产生活做出更大的贡献。
